17°
17°La Sociedad Rural de Victoria reclamó al municipio de esa localidad entrerriana por los nuevos valores que se establecieron para la tasa por uso de corrales. "Se trata de un impuesto encubierto, porque no hay contraprestación", señalaron


Todo lo que se vio y dijo durante el encuentro realizado en el Complejo Goldencenter y con la participación de 70 empresas y más de 30 panelistas.

El secretario de Bioeconomía habló sobre las acciones que se están siguiendo para frenar la plaga. Adelantó que la semana que viene visitará las zonas afectadas.
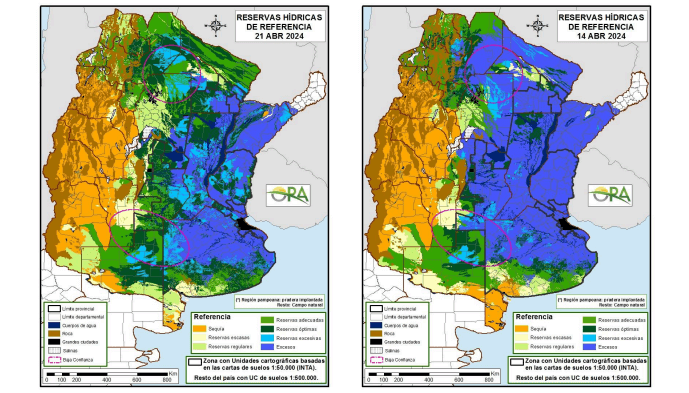
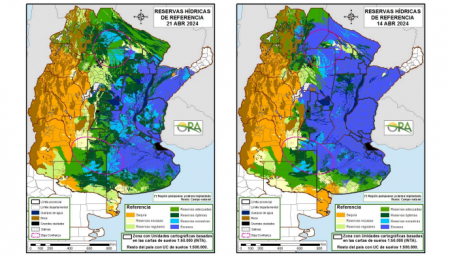
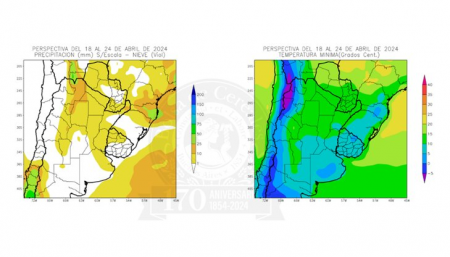
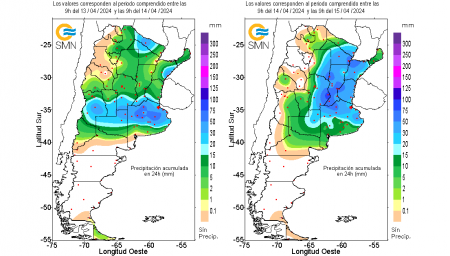
Las últimas lluvias han generado que toda la zona pampeana y el norte del país tengan un panorama excelente para la campaña fina. El problema es que La Niña se instala como una posibilidad cada vez más fuerte.

El Gobierno provincial lanzó el plan "Cultivando Vínculos", a través del cual los Ministerios de Educación y de Bioagroindustria promoverán las huertas escolares en los establecimientos educativos.

"Me encanta el sector agropecuario porque realmente siento que está alineado con mi propósito, que es hacer que la tecnología tenga un impacto real en el mundo", relata la nueva protagonista de ELLAS.
El experto en fitopatología de la Facultad de Agronomía de la Universidad de Buenos Aires (FAUBA) fue otro de los participantes del Programa de Formación: Los Nuevos Alquimistas, de Sigma Agro.

Fernando Storni renovó mandato y estará al frente de la entidad durante el período 2024-2025. Será acompañado por Pablo Grahman como vicepresidente

Las entidades del campo se reunieron con representantes de diferentes fuerzas legislativas, para pedirles que reviertan la Ley Fiscal, debido a las “inconsistencias” en el Impuesto Inmobiliario Rural 2024.