16°
16°La Federación que nuclea a las empresas de transporte de cargas manifestó su rechazo a un nuevo aumento de los peajes autorizado por el Gobierno nacional. Afirma que en un año y medio subieron 800%.


Bioceres Semillas y ucrop.it se unieron para impulsar la trazabilidad a lo largo de toda la cadena de valor de la soja en el país vecino: desde su siembra hasta su llegada al consumidor final.

Se realizó una nueva reunión de la mesa técnica de la que participan autoridades y representantes de diversas entidades del campo. Habrá otro encuentro el próximo 2 de mayo.
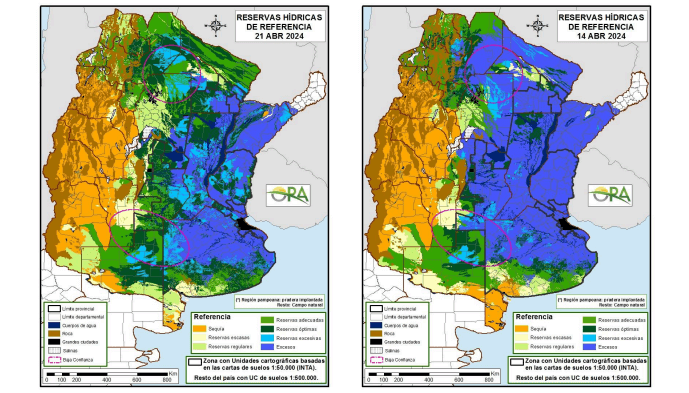
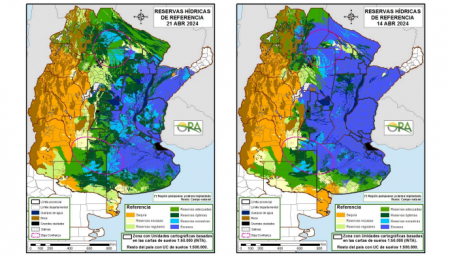
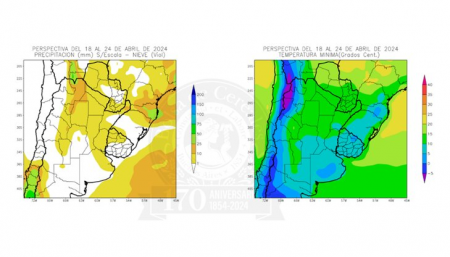
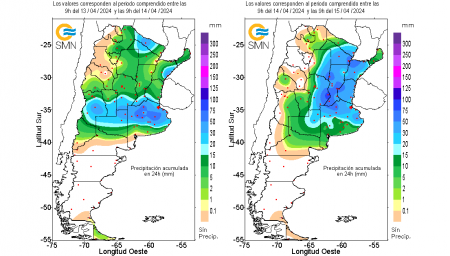
Las últimas lluvias han generado que toda la zona pampeana y el norte del país tengan un panorama excelente para la campaña fina. El problema es que La Niña se instala como una posibilidad cada vez más fuerte.

El Gobierno provincial lanzó el plan "Cultivando Vínculos", a través del cual los Ministerios de Educación y de Bioagroindustria promoverán las huertas escolares en los establecimientos educativos.

"Me encanta el sector agropecuario porque realmente siento que está alineado con mi propósito, que es hacer que la tecnología tenga un impacto real en el mundo", relata la nueva protagonista de ELLAS.
El experto en fitopatología de la Facultad de Agronomía de la Universidad de Buenos Aires (FAUBA) fue otro de los participantes del Programa de Formación: Los Nuevos Alquimistas, de Sigma Agro.

En marzo cayeron las ventas al exterior de cortes bovinos como consecuencia de un ajuste de los embarques a Europa, vinculado a menores envío dentro de la Cuota 481. Israel sigue siendo el único mercado que mantiene un ritmo alcista.

El Gobierno provincial lanzó el plan "Cultivando Vínculos", a través del cual los Ministerios de Educación y de Bioagroindustria promoverán las huertas escolares en los establecimientos educativos.